For this lab we went out to the soccer fields once again to practice conducting preflight operations with a multi rotor UAS. This consisted of going through preflight checks as both the Pilot in Command (PIC) and the Pilot at the Controls (PAC). We were spilt up into the same groups as last week and when one group was working with the multi rotor, the others were learning more about batteries from Doc P.
Study Area:
The study area was located at the soccer fields south of Hamilton Road and southwest of Bollinger Fields (Figure 1). Each group created and flew their own mission but to some extent everyone's mission was located over the pavilion as shown in Figure 2 below.
 |
| Figure 1: Aerial locating the study in relation to UWEC and Bollinger Fields |
 |
| Figure 2: Aerial locating the study area in relation to our home base |
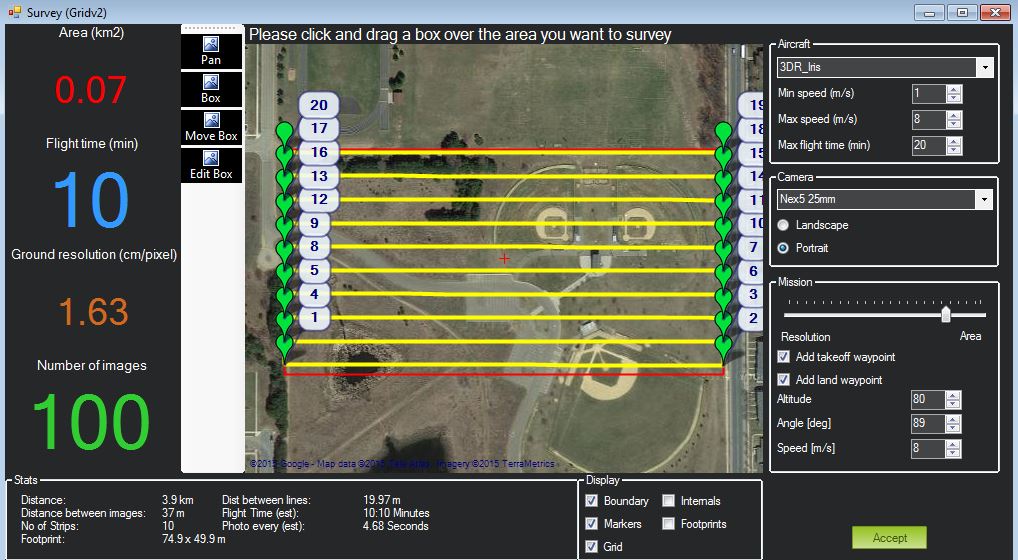
I was put as the Pilot at the Controls so I will go through all the steps that I needed to take to ensure that everything flowed smoothly as possible for this mission. First, I created the mission on Mission Planner (Figure 3) and worked with all the different parameters so that my flight was the most efficient it could be. Examples of efficiency would be making sure that I am not taking unnecessary passes over the study area and that I am flying at the optimal height for sensor capture. One big parameter that you can set is the angle of the flight path so that you take long passes over the study area to minimalize the time it takes to turn around cause it can really add up when your battery is getting low. Once the flight plan is made then I would start the rest of the checklist (Table 1) which includes writing the mission I just created to the aircraft and then reading it back so I am absolutely sure that it received the correct mission and then writing it one more time.
 |
| Figure 3: Photo showing myself as the Pilot at the Controls (PAC) creating the mission |
 |
| Table 1: Checklist for a Multi Rotor aircraft |
Other checks that I had to run through would be commands to the Pilot in Command whose job is was to run the checks on the aircraft itself. These consisted of making sure that all the electrical connections are secure, as well as if the props had any cracks in them. If any of these checks were not performed and something happened during the flight, then the aircraft could crash and cause significant damage to itself or even worse, a spectator. The PAC is also in charge of making sure that the flight area is secure and that there is no inclement weather that could harm the mission. There needs to be constant communication between the PAC and the PIC. The PAC needs to check the battery often to make sure that nothing is causing it to drop, as well make sure that there are always enough satellites so that we can continue with the mission. Once all the preflight checks have been made then we can move on to the takeoff sequence. This also involves the PAC making sure that the checklist is completely covered (Figure 4) and the PIC is ready to take over. Once the Transmitter (TX) is turned on and the base station gives control to the PIC then they are responsible to make sure they safely land the aircraft should something go wrong.
 |
| Figure 4: Photo showing myself as the Pilot at the Controls (PAC) finishing the checklist |
Discussion:
Although we did nothing with the data, it is very important that this lab was implemented into this course. Without the knowledge and knowhow of how to safely takeoff and land a mission, this could be a very dangerous undertaking. This is one instance of when you need to put down everything else and completely focus on the task at hand. You cannot relax and you cannot snooze off or ever take your eyes off of the task. For the PAC the task is the computer screen and making sure that nothing goes wrong, because if something does go wrong, you will notice it on the computer screen before you see it anywhere else. For the PIC the task is the aircraft itself, because in the event something does go wrong they need to immediately take over and take quick action without having to find the aircraft in the sky first. Now as a spectator, you also need to be paying attention to whatever is going on and always keep your head on a swivel just in case something does happen. We don't want any harm to occur to the aircraft but even more so we don't anybody to get hurt and/or worse.
Conclusion:
To truly respect UAS, you must understand what they are capable of and know that in the event of a worse case scenario, how do you fix the problem or how do you minimalize the damage that is going to occur. Another reason to go through this checklist is to have a record of everything that has been done. Ex: Who is the PAC or PIC, have all the checks been run, what is the aircraft and what batteries are you using as well as the time of day, location, and weather!